ロボットビジョン・Spatial AI研究室
研究概要
映像を解析・処理することで、ロボットが現実世界を理解し、人と共存する。そんなワクワクするような未来を目指して研究しています。
人間が物を見たとき、詳細を完全に覚えているわけではなく、色や形、大きさ、用途などの特徴を無意識に認識しています。このように物事を抽象的にとらえるという認識プロセスをロボットに応用することで、より効率的な処理が可能になると考えています。
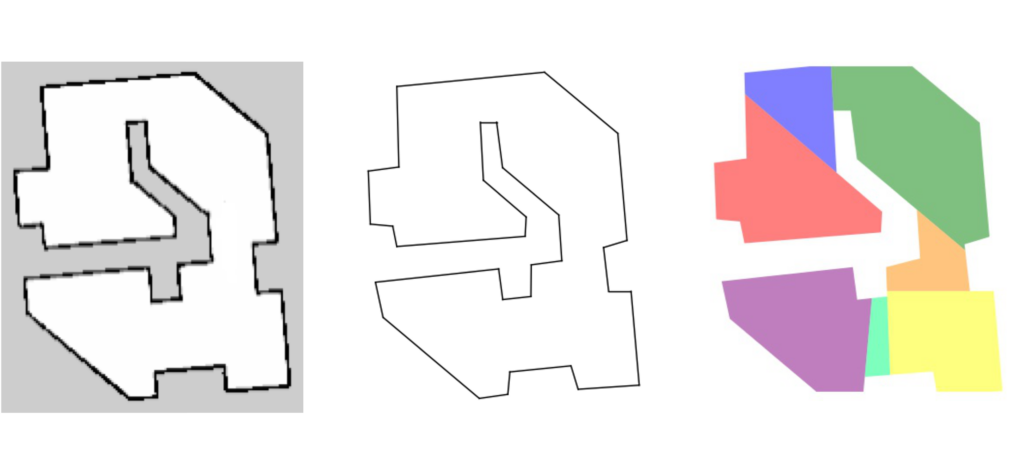
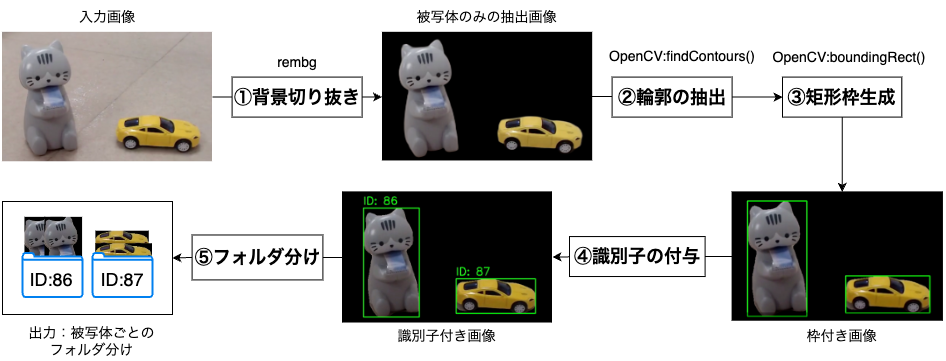
現在、私たちは、サービス利用者数を自動計測する技術やナビゲーション用の環境マップを拡張する研究、そして実世界の物体を3Dオブジェクト化する研究を進めています。また、ロボットエンジニアに必要な技術を習得できるよう、ロボットの制御や通信、機械学習、ロボットビジョン、Spatial AIなどにも積極的に取り組んでいます。

研究内容


ニュース
192-0982 東京都八王子市片倉町1404-1
研A-0607
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982 LabA-0607